今年應該是迷你四軸大爆發的一年,才年初就已經看到好幾架的迷你四軸機,今天又看到一台華科爾(Walkera)在小飄蟲之後的又一力作 QR Infra,既然特別介紹當然有它的特殊之處,這次他們運用了紅外線避障再加上超音波定高,這兩項功能都是市場上中高階的飛控必備,表示他們的研發團隊是有在注意市場的脈動,這兩項功能對於沒接觸過的人會有相當大的幫助,不用擔心衝太快撞到牆,不用擔心油門控制不好飛機上上下下,有興趣的朋友可以注意各大拍賣網,應該會是個很有趣的玩具。
To use your Arduino board to burn a bootloader onto an AVR, you need to follow a few simple steps.
Open the ArduinoISP firmware (in Examples) to your Arduino board.
Note for Arduino 1.0: you need to make one small change to the ArduinoISP code. Find the line in the heartbeat() function that says "delay(40);" and change it to "delay(20);".
Select the items in the Tools > Board and Serial Port menus that correspond to the board you are using as the programmer (not the board being programmed).
Upload the ArduinoISP sketch.
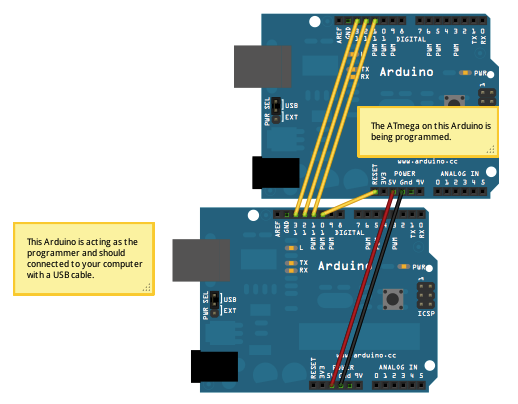
Wire your Arduino board to the target as shown in the diagram below. (Note for the Arduino Uno: you'll need to add a 10 uF capacitor between reset and ground.)
Select the item in the Tools > Board menu that corresponds to the board on which you want to burn the bootloader (not the board that you're using as the programmer). See the board descriptions on the environment page for details.
.jpg)


.png)